- 논문 : CenterMask : Real-Time Anchor-Free Instance Segmentation
- 분류 : Real Time Instance Segmentation
- 저자 : Youngwan Lee, Jongyoul Park
- 느낀점 :
- mask scoring [15] 논문을 꼭 한번 읽어야 겠다.
- 목차
- Paper Review
- Code Review
- Github link : https://github.com/tianzhi0549/FCOS
CenterMask
1. Conclusion, Abstract, Introduction
- Real-time anchor-free one-stage
- VoVNetV2 backbone : (1) residual connection (2) effective Squeeze-Excitation (eSE, Squeeze and Excitation Block (M2Det, MobileNetV3, EfficientDet 참조))
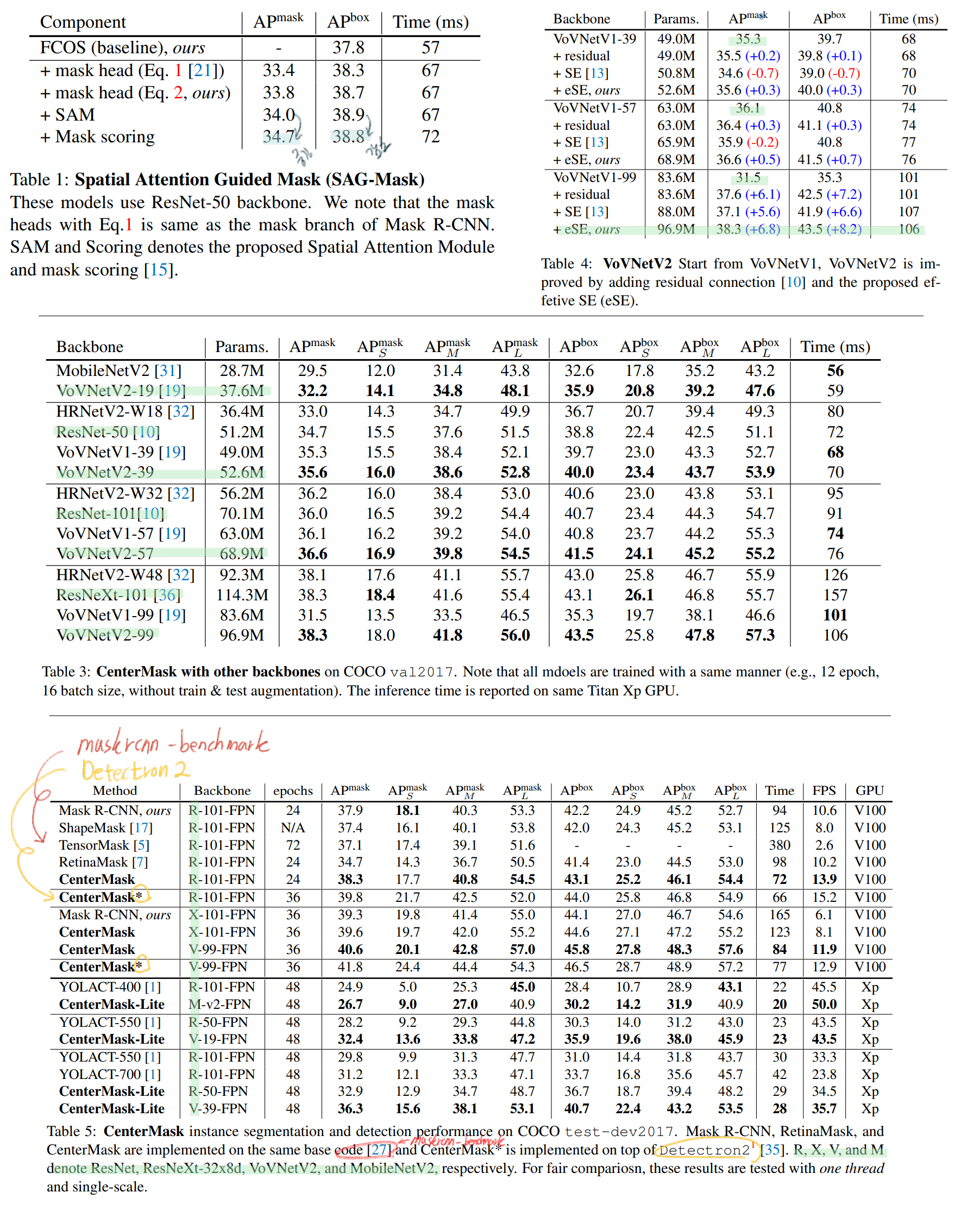
- Spatial attention guided mask (=SAG-Mask) : Segmentation Mask를 예측한다. spatial attention을 사용함으로써 집중해야할 Informative Pixel에 집중하고, Noise를 Suppress한다.
- ResNet-101-FPN backbone / 35fps on Titan Xp
- (PS) Introduction은 읽을 필요 없는 것 같고, Relative Work는 아에 없다. Introduction에 Relative Work의 내용들이 가득해서 그런 것 같다.
2. CenterMask architecture
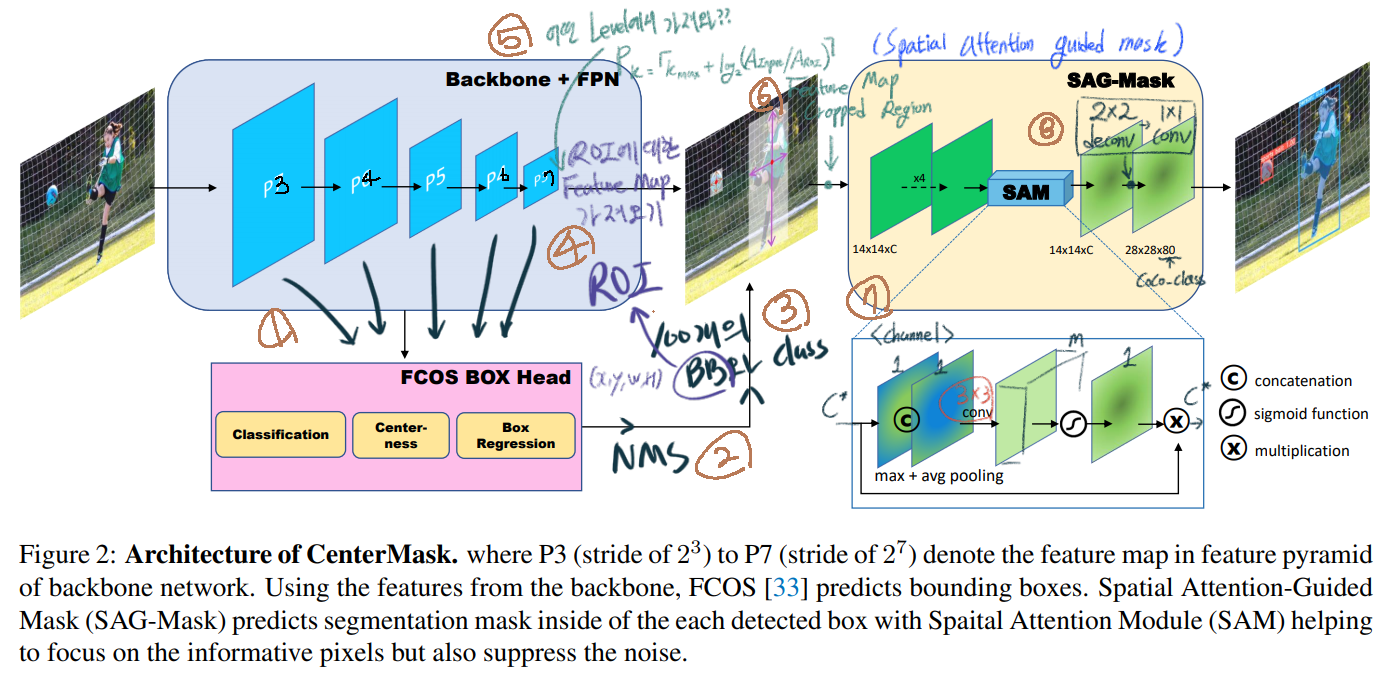
- 논문의 그림에서 P7~P3의 그림이 이상해서 내가 다시 표시했다. 내가 수정한게 더 맞는 것 같다.
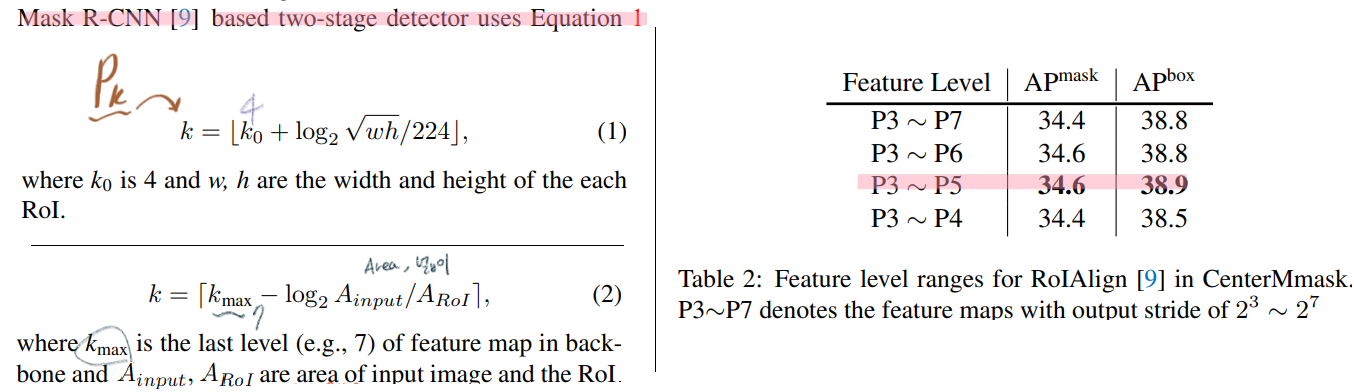
2.3. Adaptive RoI Assignment Function
-
위 필기 갈색5번을 참조하면 ROI는 구했고, 그 ROI를 가져올 때, 어떤 Feature Level을 사용해야하는가?
-
위 Equation1 은 Mask rcnn에서 사용하던 방식이다. 하지만 이것을 그대로 사용하기에는 문제가 있다. 첫째로, 이 방식은 feature levels of P2 (stride of 2^2) to P5를 사용하는 2 stage detector에 더 적합하다. 우리는, P3 (2^3) to P7 (2^7)를 사용하는 one stage detector를 개발해야한다.
-
게다가 위의 224는 ImageNet Image size이다. 이것은 굉장히 Heuristic한 설정이고, 이와 같은 설정을 유지해서 계산을 해보면, 특정 wh에 따라 선택된 k 값은 상대적으로 작은 값이다. 다시 말해, 좀 더 큰 resolution의 Feature map에서 ROI feature를 가져와야 하는데, 작은 Resolution의 Feature map에서 ROI feature를 가져오므로 작은 객체 탐지를 어렵게 만든다.
-
따라서 우리는 Equation2를 새로운 Feature Level 설정 방법으로 사용한다. 몇가지 경우와 수를 고려해보면, Image area의 절반이상의 ROI area를 가지는 객체는 무조건 P7에서 Feature를 가져오고, 상대적으로 Equation 1보다 작은 k값의, P_k에서 feature를 가져와 small object detection에 도움을 준다.
-
ablation study를 통해서 k_max to P5 and k_min to P3 를 사용하는게 가장 좋은 결과를 가져다 주었다고 한다.
2.4. Spatial Attention-Guided Mask
- 최근 attention methods은 Detector가 중요한 Feature에 집중하는데 도움을 준다. 'what’을 강조해주는 channel attention과 'where’을 강조해주는 spaital attention이 있다. CBAM이 위의 2가지 방법을 적절히 잘 섞은 방법이다.
- 이 논문에서는 spaital attention를 사용해서, Mask head가 정말 의미있는 Pixel에 집중하고, 무의미한 Pixel은 억압되도록 만들었다.
- 그것이 SAG-Mask (a spatial attention-guided mask) 부분이고 위의 Architecture 그림에 잘 그려져 있다.

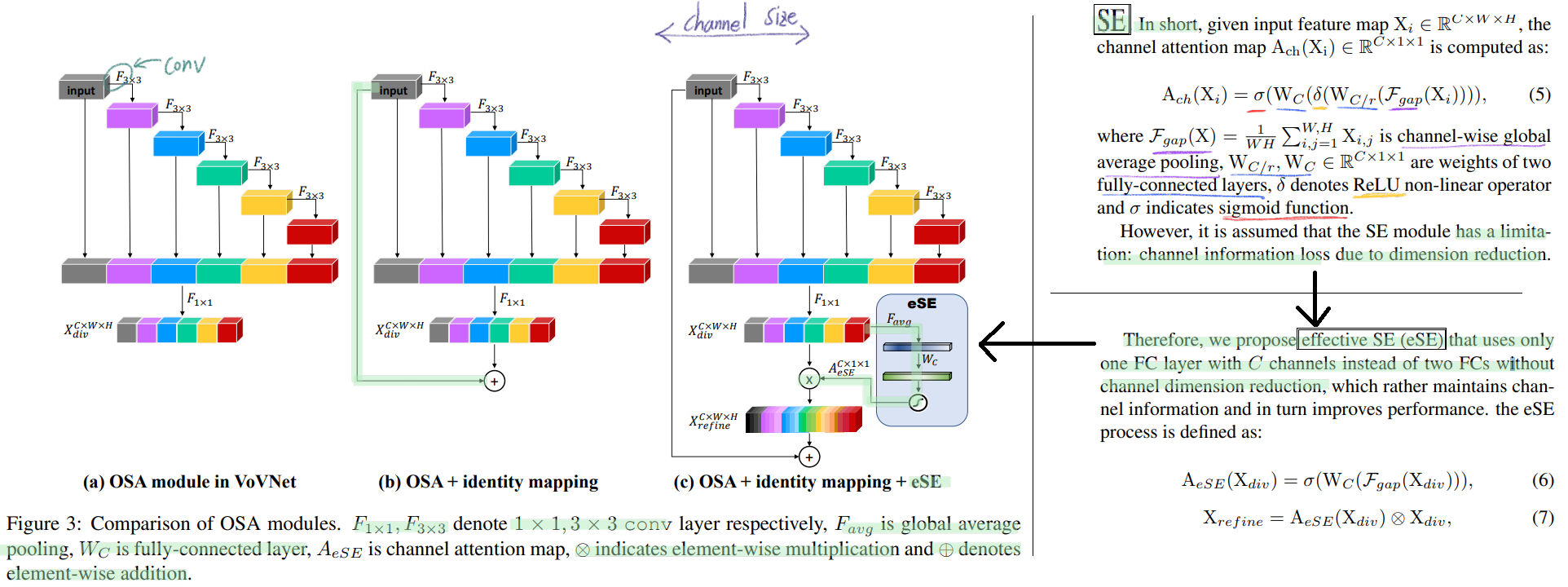
2.5. VoVNetV2 backbone
- VoVNet는 ‘computation + energy’ efficient backbone network 이다. 이 네트워크는 효율적으로 다양한 feature representation(map)들을 보존한다. VoVNetV1 또한 이 논문 저자가 발표한 논문의 방법이다.
- 이번 VoVNetV2에서는 특별하게 effective SE 모듈을 추가했다. effective SE 모듈은 기존의 SE 이 2번의 fc layer를 통과시키면서, dimension reduction 과정을 거치고 이 과정에서 정보의 손실이 생긴다고 주장한다. 따라서 1번의 fc layer만 통과시키는 effective SE 모듈를 주장한다.
- Architecture의 모습은 아래와 같다.
2.6. Implementation details
- mask scoring [15] 를 사용했다. 예측한 mask의 quality (e.g., mask IoU)를 고려하여, classification score를 재조정하는 방법이다. (이 방법을 어떻게 사용했는지 구체적인 방법에 대해서는 안 나와 있다. mask scoring [15] 논문을 봤다는 전제를 하는 것 같으므로 나중에 mask scoring [15] 논문을 꼭 읽어봐야겠다.)
- CenterMask-Lite : backbone, box head, and mask head 에 대해서, down-sizing을 하여 성능은 조금 낮아져도, 속도가 빨라지도록 만들었다. 구체적으로 어떻게 down-sizing 했는지는 논문에 간략히 적혀있으니 필요하면 참조.
- Training :
- FCOS에서 나오는 100개의 박스를 SAG-mask branch에 fed한다.
- Mask R-CNN과 같은 mask-target을 사용했다. 이 mask-target은 Mask-IOU를 이용해 정의 된다.
- Loss_total = L_cls + L_center + L_box + L_mask
- input image는 가로 세로 중 짧은 쪽이 800이 되도록 resize된다. 긴쪽은 1333이 되거나 1333보다 작은 pixel크기가 된다.
- 90K iterations (∼12 epoch) with a mini-batch of 16 images
- SGD, weight decay of 0.0001 and a momentum of 0.9
- initial learning rate 0.01 which is decreased by a factor of 10 at 60K and 80K iterations, respectively
- All backbone models 은 ImageNet pre-trained weights 를 사용했다.
- Inference :
- FCOS에서 나오는 50개의 박스를 SAG-mask branch에 fed한다.
- CenterMask/CenterMask-Lite use a single scale of 800/600 pixels for the shorter side
3. Results